
Page 69 - ATZ11 November 2019 Professional
P. 69
LoHA LoHA
Maximized Minimized
Minimal
cooperation cooperation cooperation
System System
Novice
Reduced cooperation Intermediate
Pro
Safety
Driver Driver
Manual driving
Driver System Driver System
Planning adaption (LoPA) Planning adaption (LoPA)
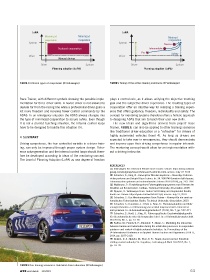
FIGURE 4 Different types of cooperation (© Volkswagen) FIGURE 5 Tuning of the active steering assistance (© Volkswagen)
Race Trainer, with different symbols showing the possible imple- plays a central role, as it allows unifying the objective teaching
mentation for three driver skills. A novice driver is not allowed to goal and the subjective driver experience. The resulting types of
deviate far from the racing line while a professional driver gains a cooperation offer an intuitive way for realizing a training experi-
lot more freedom and receives fewer control commands by the ence that offers guidance, freedom, individuality and safety. The
ADAS. In an emergency situation the ADAS always changes into concept for mentoring systems therefore offers a holistic approach
the type of minimized cooperation to assure safety. Even though to designing ADAS that aim to teach their user new skills.
it is not a desired teaching situation, the internal control loops The new ideas and algorithms derived from project Race
have to be designed to handle this situation [5]. Trainer, FIGURE 6, can also be applied to other training scenarios
like traditional driver education or a “refresher” for drivers of
highly automated vehicles (level 4). As long as drivers are
4 SUMMARY
expected to take over in emergencies, they should demonstrate
Driving competence, the true controlled variable in a driver train- and improve upon their driving competence in regular intervals.
ing, can only be improved through proper system design. Refer- The mentoring concept would allow for an implementation with-
ence value generation and the internal control loops should there- out a driving instructor.
fore be developed according to ideas of the mentoring concept.
The Level of Planning Adaption (LoPA) as new degree of freedom
REFERENCES
[1] Volkswagen AG: Research Vehicle Race Trainer. Online: https://www.volkswa-
genag.com/en/group/research/research-vehicles.html, access: July 27, 2019
[2] Schacher, S.; King, R.: Konzept für Mentorensysteme – Neuartige Fahreras-
sistenzsysteme am Beispiel Race Trainer. In: 34. VDI/VW-Gemeinschaftstagung
Fahrerassistenzsysteme und automatisiertes Fahren 2018 (2018), pp. 283–298
[3] Waldmann, P.: Entwicklung eines Fahrzeugführungssystems zum Erlernen der
Ideallinie auf Rennstrecken. Cottbus, Technical University, dissertation, 2009
[4] Nguyen, V.: Volkswagen Race Trainer Self-Driving and Augmented Reality
hands-on. Online: https://youtu.be/5wPoGc8Z2q4, access: July 27, 2019
[5] Schacher, S.: Das Mentorensystem Race Trainer – Konzept für ein semi-au-
tomatisches Fahrertraining. Berlin, Technical University, dissertation, 2019
[6] Schacher, S.; Haneberg, J.: Hödt, J.; King, R.: Planungsadaption und Aktiv-
ierungsschranken zur Abstimmung von vertikal kooperierenden Fahrerassis-
tenzsystemen. In: at-Automatisierungstechnik 67 (2019), No. 7, pp. 557–571
[7] Schacher, S.; Hödt, J.; King, R.: Fahrerspezifische Geschwindigkeitsprofile
für die automatische oder die kooperative Fahrt. In: at-Automatisierungstechnik
66 (2018), No. 1, pp. 53–65
[8] Baltzer, M.; Flemisch, F.; Altendorf, E.; Meier, S.: Mediating the interaction
between human and automation during the arbitration processes in cooperative
guidance and control of highly automated vehicles. In: Proceedings of the
5 th International Conference on Applied Human Factors and Argonomics (AHFE),
2014, pp. 2107–2118
[9] Abbink, D. A.; Mulder, M.; Boer, E. R.: Haptic shared control: Smoothly
shifting control authority? In: Cognition, Technology & Work 14 (2012), No. 1,
pp. 19–28
FIGURE 6 One training scenario is traditional driver education (© Volkswagen)
ATZ worldwide 11|2019 63